Small or difficult-to-access spaces such as areas covered with rubble, or narrow pipes and engines can pose obstacles to search-and-rescue missions, repair works, or environmental and industrial monitoring. One solution for these problems could be small-sized robots that are able to navigate such spaces, transport payload, sense, and communicate.
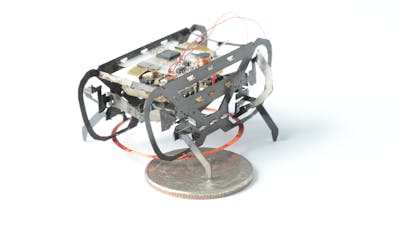
Wyss Institute researchers have developed a 1.5 gram, insect-scale microrobot, called HAMR (short for Harvard Ambulatory Microrobot) with locomotion capabilities beginning to approach those of the insects, and with the opportunity to add even more functions.

HAMR, with more than 60 joints including hip and legs joints that mimic those of cockroaches, is manufactured using the institute’s pop-up microelectromechanical systems (MEMS) fabrication process that enables the construction of small-scale devices with complex 3D topologies and functionalities. During manufacturing, HAMR’s light, compliant, and damage-resistant, is first built in a planar sheet and then popped out in its 3D structure.
Small autonomous robots can take advantage of the unique physics of their scales and perform tasks that would be extremely challenging for larger robots. The HAMR platform is an exciting example and could be leveraged for use in search and rescue, infrastructure inspection, and hazardous environment exploration applications.
Carrying its own battery, HAMR is able to autonomously run at speeds of 4 body-lengths per second and realize a variety of quadrupedal gaits at stride frequencies of up to 35 Hz. This allows HAMR to maneuver around obstacles in restricted spaces, and, with the help of eight actuators, it can be developed to carry out various tasks.
HAMR’s newest iteration, HAMR-E, has special electroadhesive foot pads, origami-based ankle joints, and a customized gait that allows it to scale vertical, inverted, and curved surfaces, such as the insides of jet engines and other complicated machines.
In the future, the HAMR could be functionalized with thermo- or chemical sensors, cameras, microphones and other communication technology, or be deployed to deliver devices and materials to locations unreachable for humans. HAMR, with its versatile locomotion capabilities and opportunity for rapid design iteration, also presents a platform that can enable researchers to better understand biological principles in nature by quickly testing hypotheses about locomotion.
The HAMR technology is available for licensing.
Please see also our microrobotics technologies for autonomously flying microrobots (RoboBees) and millimeter-scale Delta robots (milliDelta).